
LaskaKit RoboBoard ESP32
Code: LA100075I LA100075P Choose variant





Product detailed description
Build a robot! Don't worry, it's nothing complicated. With our RoboBoard-ESP32, it's a breeze. The RoboBoard has everything important for a simple robot on it, and you can eventually make it into a much more complex robot thanks to the expansion connectors for both I2C and SPI bus.
You can connect countless other peripherals.
The basis of the whole board is ESP32 - it hides a great performance, the possibility to use Wi-Fi or Bluetooth interface and also a large community of bastlers who have already invented many projects with it. You are not going into unknown waters - ESP32 is one of the most famous and most used modules ever.
RoboBoard-ESP32 has a ready-made programmer (CH9102F) on it, just plug the USB-C cable into the board and your computer, start Arduino IDE and you can start programming. The converter-programmer takes care of loading the program into the ESP32. ATTENTION! It is necessary to have a battery connected, the board does not have a USB power option!
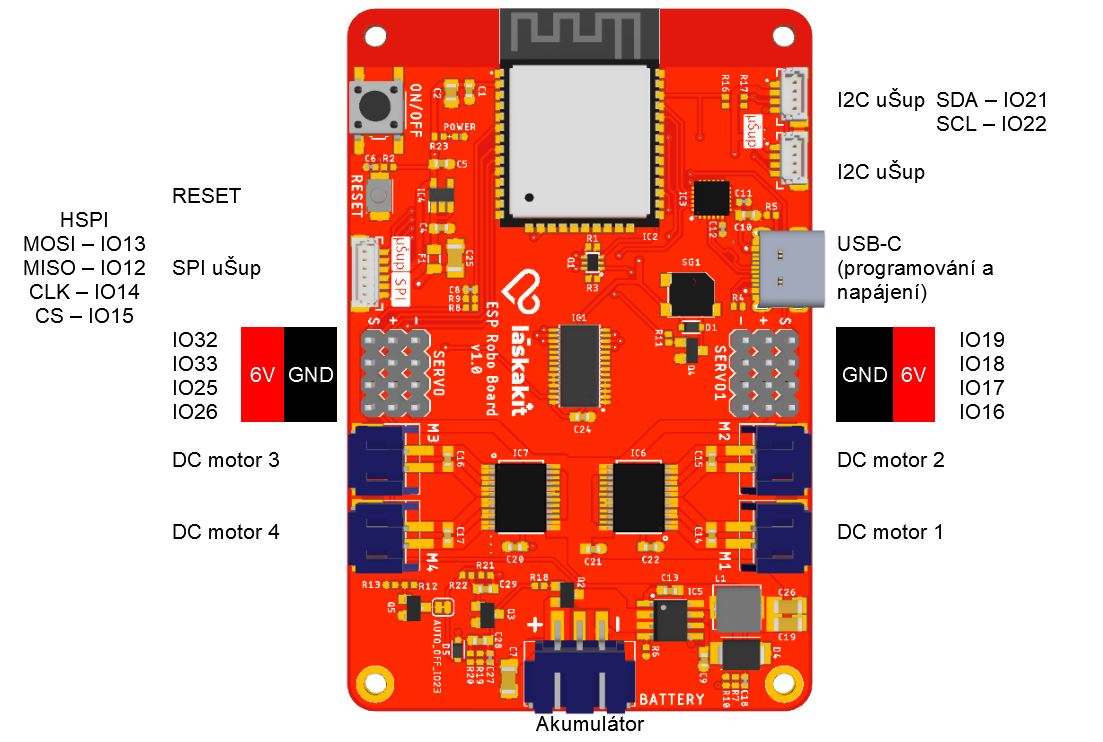
The RoboBoard-ESP32 can drive up to 4 DC motors using PWM, thanks to the TB6612 driver. The maximum continuous current through one channel is 1A. The TB6612 DC motor driver is controlled via the PCA9685, which is controlled via the I2C bus. So you only need two wires (I2C, SDA - GPIO21 and SCL - GPIO22) to control up to 4 DC motors.
If you don't want to use DC motors or you would like to add Servos to them, RoboBoard-ESP32 is ready for this option. Up to 8 servo motors can be connected - what you use the servo motors for is up to you. The individual servo motors are controlled by GPIO16 to GPIO19, then GPIO25 and GPIO26 and lastly GPIO32 and GPIO33.
What else have we prepared on the album? We have installed a buzzer, you can control it via GPIO27. Then we installed two I2C pin connectors to connect I2C sensors that are powered by 3.3V (SDA - GPIO21 and SCL - GPIO22) and one SPI pin to connect other sensors or displays powered by 3.3V (CS - GPIO15, SDI/MOSI - GPIO13, CLK - GPIO14, SDO/MISO - GPIO12).
For the battery we have a standard three-pin connector JST-XH-3P, where you can connect 2S LiPol batteries - for example this one
The motors are powered via the LMR14050 step-down switching inverter from a 2S battery that can supply up to 5A.
The battery voltage, via the voltage divider, is fed and measured by GPIO34
Delivery components:
- 1pc LaskaKit RoboBoard ESP32
Remark:
- This product is not a standalone functional unit and may require professional installation.
- Product images are for illustration purposes only and may sometimes differ from the actual appearance of the item. However, this does not change its basic properties.


Be the first who will post an article to this item!
 Dotaz
Pavel
Dotaz
Pavel
Reply
 Dotaz
Konstantin Láska
Dotaz
Konstantin Láska
 Velmi elegantní deska, palec nahoru ale.....
Ivan Todorov
Velmi elegantní deska, palec nahoru ale.....
Ivan Todorov
Reply
 Program nejde nainstalovat
František Rudolf Merc
Program nejde nainstalovat
František Rudolf Merc
Reply
 Program nejde nainstalovat
Martin Frajdl
Program nejde nainstalovat
Martin Frajdl
 DC motory
Igor Obršlík
DC motory
Igor Obršlík
Reply
DC motory
Martin Frajdl
Otazka ohledne kodu
Igor Obršlík
Reply
Otazka ohledne kodu
Martin Frajdl
 Firmware
Ondra
Firmware
Ondra
Reply
Firmware
Martin Frajdl