
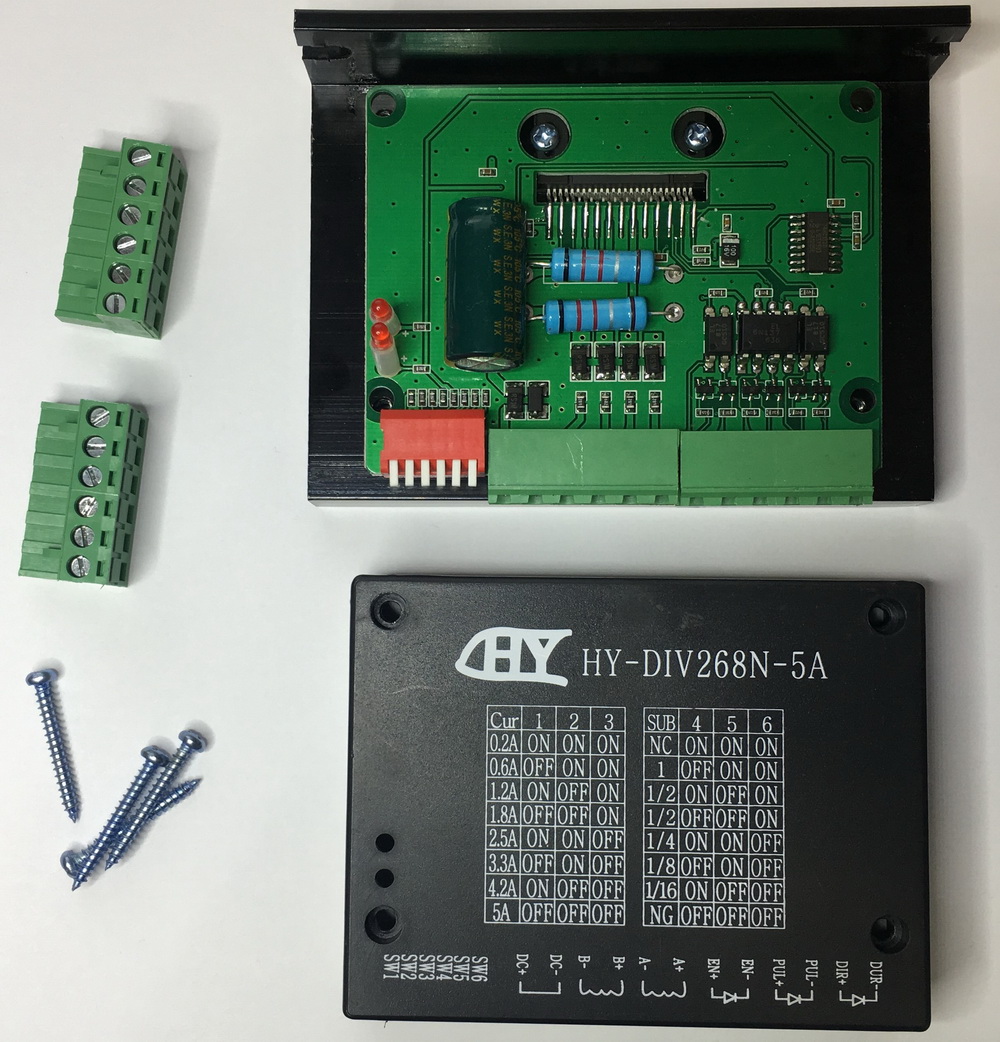
HY Driver HY-DIV268N-5A Toshiba TB6600 for stepper motors 5A 42V
Code: LA143032Free Shipping
From 100 EUR
30 Days to Return
For Registered

30 Days to Return
For Registered Customers

Free Shipping
For orders from 100 EUR

Customer Care
We handle complaints within 5 days

Quick dispatch
Within 24 hours
Product detailed description
The module is designed for controlling one bipolar stepper motor with PUL and DIR signals. Includes circuits for microclocking and idle current reduction to reduce motor overheating.
Can be used with any motor up to NEMA23.
Parameters:
- Supply voltage range: +8 to 42V (DC)
- Recommended working voltage: max. +36V
- Maximum output current: 5A
- Recommended output current: 4A
- Current setting
- The stationary current is automatically reduced by half
- Undervoltage, overcurrent, thermal and output short circuit protection
- Total on-state resistance (Ron) = 0.4 Ω (typ.)
- Microstepping: 1/2, 1/4, 1/8 and 1/16 of the basic step
- Maximum input voltage of all inputs: +5.5V
- Maximum frequency at PUL input: 200kHz
- Built-in pull-down resistors on inputs: 100 kΩ (typ.)
- Size: 91x76x36mm
- Weight: 156g
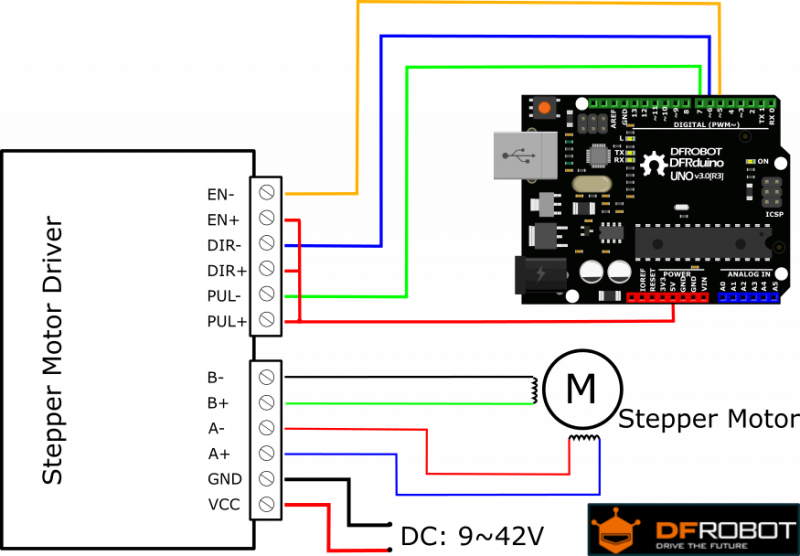
Wiring
Included in delivery:
- 1pc HY Driver HY-DIV268N-5A Toshiba TB6600 for stepper motors 5A 42V
Remark:
- This product is not a standalone functional unit and may require professional installation.
- Product images are for illustration purposes only and may sometimes differ from the actual appearance of the item. However, this does not change its basic properties.
Additional parameters
| Category: | Motor Drivers |
|---|---|
| Warranty: | 2 years |
| Weight: | 0.244 kg |



3,0
1 rating
Add a rating
5
4
3
2
1
List of ratings
3
Z
 Zdeněk
Zdeněk
 Zdeněk
Zdeněk
Ať zvenku tyto typy driverů vypadají vždy stejně, uvnitř se liší el. zapojením pomocné elektroniky okolo hlavního obvodu TB6600. Ze 4 koupených driverů byly zcela totožné pouze 2. Nakupoval jsem v několika měsíčních rozestupech ve dvou e-shopech.
Našel jsem tyto odlišnosti:
- různě řešené ovládací vstupy EN, PUL, DIR (vyžadující/nevyžadující předřadný rezistor, vstupy jsou realizovány optočleny s nebo bez obvodu omezení proudu diodou optočlenu, různé typy optočlenů)
- různě řešený obvod pro omezení proudu fázemi motoru (když se nekrokuje, proud fázemi motoru klesne na 30 %)
- různé hodnoty v odporovém děliči na pinu VREF TB6600 pro nastavení proudu fázemi motoru
- (ne)přítomnost externích rychlých výběhových diod na výstupech A+,A-,B+,B- . Jeden driver neměl tyto diody vůbec, zbylé 3 drivery měly osazeny jen spodní diody (vůči GND). Pro dokonalou (plnou) ochranu obou H-můstků integrovaných v TB6600 by bylo potřeba 8 těchto diod, 4 pro každý H-můstek. Výrobce v datasheetu neuvádí zda TB6600 obsahuje integrované výběhové diody, ale měřením jsem zjistil, že ano, takže je otázka, zda jsou externí diody nutné.
- (ne)kvalita osazení PCB součástkami (křivě zapájené) a kvalita jejich zapájení
Driver nabízený na tomto eshopu:
- V přívodu napájení (svorka DC+) je ochranná dioda proti přepólování.
- Ovládací vstupy EN, DIR, PUL obsahují omezovač proudu (zdroj proudu) nastavený na 20 mA, takže tyto vstupy lze spínat přímo napětím od cca 2 V výše bez předřadného rezistoru.
- Povel "udělej krok" se realizuje sestupnou hranou na svorce PUL (vypnutí proudu svorkou PUL).
- Tabulka s výběrem proudu fázemi krokového motoru (SW1, SW2, SW3) neodpovídá realitě.
Naměřil jsem:
SW1 SW2 SW3 Proud napsaný na víčku Skutečný špičkový proud Skutečný ustálený proud
ON ON ON 0,2A 0,38A 0,1A
OFF ON ON 0,6A 1,42A 0,41A
ON OFF ON 1,2A 2,16A 0,62A
OFF OFF ON 1,8 A 2,7A 0,78A
ON ON OFF 2,5A 3,36A 0,98A
OFF ON OFF 3,3A 3,66A 1,08A
ON OFF OFF 4,2A 3,88A 1,16A
OF OFF OFF 5A 4,08A 1,22A
Proudy jsem měřil proudovými kleštěmi Fluke i30s připojenými k osciloskopu.
- Driver obsahuje rychlé výběhové diody na výstupech A+,A-,B+,B-, ale má jen spodní diody (vůči GND). Horní diody opřené vůči napájecímu napětí chybí.
- Obvod pro snížení proudu fázemi motoru, když se nekrokuje, je špatně zapojen. U MKO 74HC123, který tuto funkci realizuje, jsou prohozené piny A, B, takže, když místo, aby se proud po povelu "udělej krok" (přechod z HIGH na LOW na svorce PUL) na okamžik (cca 2,5 ms) zvýšil na 100 %, tak zůstává na úrovni 30 % a až po dokončení kroku (přechodu z LOW na HIGH na svorce PUL) zvýší proud na 100 % na 2,5 ms, což už je ale k ničemu. Viz dále.
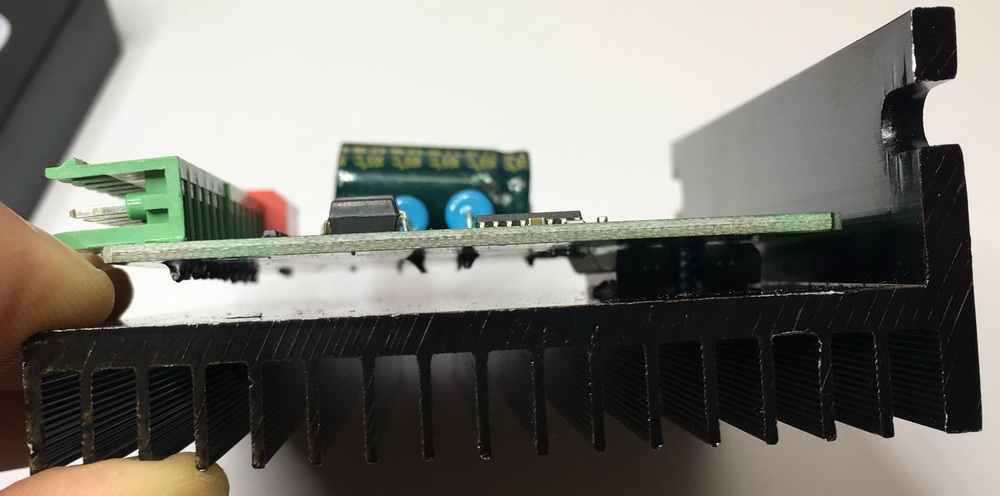
- Kvalitně osazený plošňák, kvalitně zapájeno.
- Mírně ohnutý chladící L-profil ve spodní části, kde je vybrání pro šroubek.
Driver je použitelný.
Abych to shrnul, všechny 4 kusy driverů, které se mi dostaly do ruky (včetně tohoto z laskarduino.cz) trpí těmito neduhy:
- tabulka s výběrem proudu motoru natisknutá na driveru je špatná, proudy neodpovídají skutečnosti
- logika enablovacího vstupu EN je nešťastná, driver je odblokován, když do vstupu EN neteče proud (z hlediska bezpečnosti by mělo být opačně)
- u 3 ze 4 driverů (včetně tohoto z laskarduino) byl špatně řešen obvod, který zajišťuje pokles proudu fázemi motoru (resp. boost proudu ze 30 na 100 % na začátku kroku). Buď jsem to nepochopil jak má tento obvod fungovat nebo je to opravdu špatně zapojené. U driverů používajících MKO 74HC123 lze toto poměrně jednoduše opravit (přepojení vstupů A, B na 74HC123 - vstup B připojit na výstup optočlenu PUL, vstup A uzemnit).
Be the first who will post an article to this item!